single-robot-HackEV(v2.0)の追加要素について
Hakoniwaクラスの追加
single-robot-HackEV(v2.0) ではHakoniwaクラスが設けられました.
Hakoniwaクラスはシミュレーション環境全体に関わる情報を持っています.
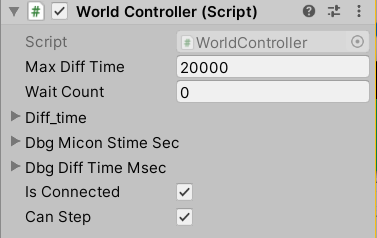
| 主なフィールド | 説明 |
|---|---|
| Max Diff Time | athrillとUnityのシミュレーション時間の最大許容誤差時間 |
| Dbg Diff Time Msec | 現在のathrillとUnityのシミュレーション時間の誤差(msec) |
Robotの配置方法
single-robot-HackEV(v2.0)ではあらかじめ用意されたいくつかのロボットモデルを
ユーザの方が任意に配置することが出来ます.
Project/Prefabs配下にいくつかのロボットモデルを用意しています.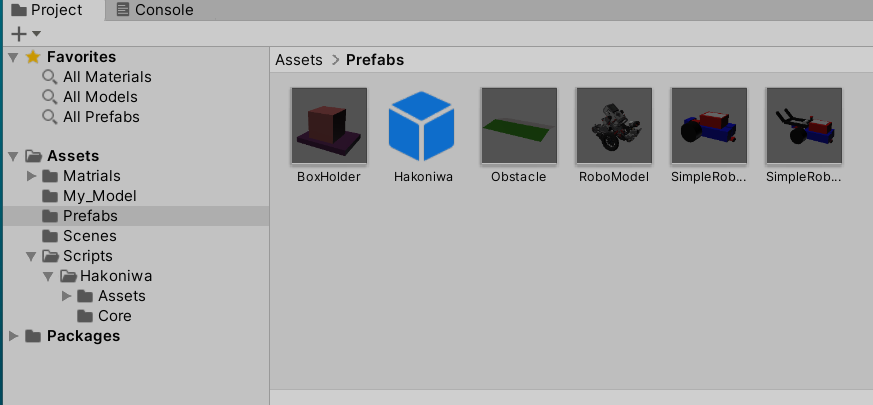
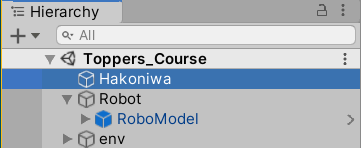
これらのロボットモデルをHierarchyビューのRobot配下にドラッグ&ドロップすることで
簡単に配置することができます.
変更可能なパラメータ
Robot のパラメータについて
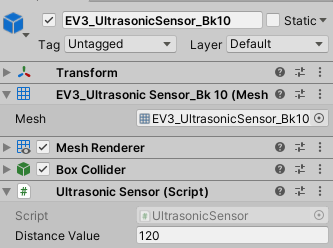
超音波センサ
Ultrasonic SensorのDistance Valueでセンサ範囲を調整できます.
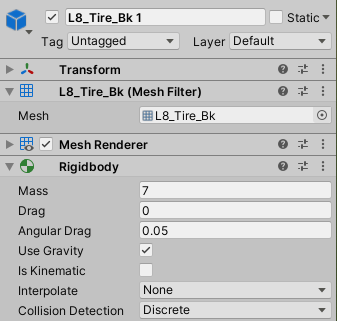
モーター
RigidbodyのMassでタイヤの重さを,Angular Dragで回転時の抵抗値を調整できます.
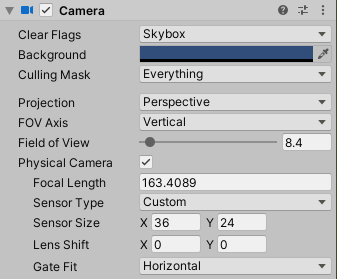
カラーセンサ
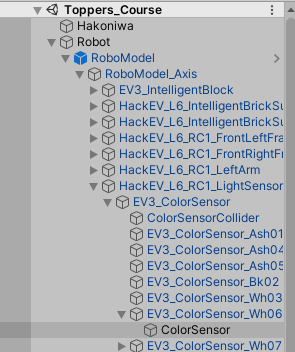
Physical CameraのSensor Sizeでセンシング範囲を調整できます.
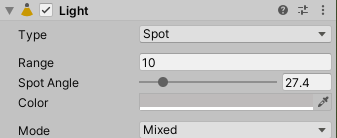
センサ用ライト
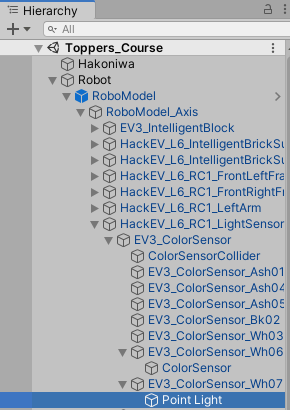
LightのRangeで光が届く範囲の距離を,SpotAngleで光が届く範囲の広さを調整できます.