単体ロボット向けシミュレータ使用手順
V2.1での変更点について
v2.1 で,Unityでのシミュレーション実行をビルドしてバイナリ実行できるようになりました.
バイナリ実行でシミュレーション実行を行う場合,
- Unityシミュレーションの実行,
- athrillの実行
をひとまとめにして実行することができます.
なお,従来の使用方法でもシミュレーションを実行することは可能ですので,
その場合は下記をご参照いただき,使用してください.
これ以降は,バイナリ実行を行うための手順の紹介となります.
使用手順
- ビルド設定
- ビルドの実行,config.jsonの配置
- シミュレーションの実行
ビルド設定
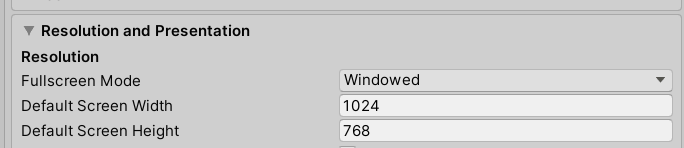
ビルドを実施する前に,バイナリ実行時のウィンドウサイズに関する設定を行います.
Unity のメニューから,「Edit」⇒「Project Settings」を選択します.
「Player」Resolution and PresentationのFullscreen Mode をWindowedと設定します.
その下の詳細なウィンドウサイズは基本そのままでもよいですが,サイズを変更したい場合は,
お使いの環境に合わせて変更してください.
ビルドの実行,config.jsonの配置
設定が完了したら,Unityプロジェクトのビルドを行います.
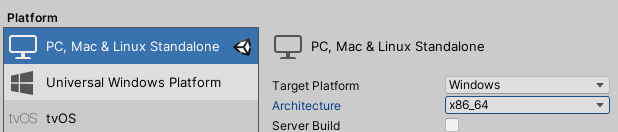
Unity のメニューから,「File」⇒「Build Settings」を選択します.
Platform は[PC,Mac & Linux Standalone]のままとします.Architectureは実行するPCのアーキテクチャに合わせて設定しますが,
どちらか分からないという方は,x86_64を選択してください.
設定を終えたら,Buildを押下してビルドを実行します.
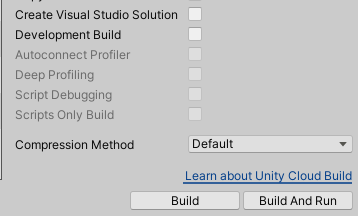
すると,どの場所にビルドしたバイナリを配置するか,選択ダイアログが表示されますので,
任意の場所を選択します.
今回は例として,ビルドするUnityプロジェクトのあるフォルダ内に,Buildフォルダを作成し,
その中にビルドしたバイナリを配置するようにします.
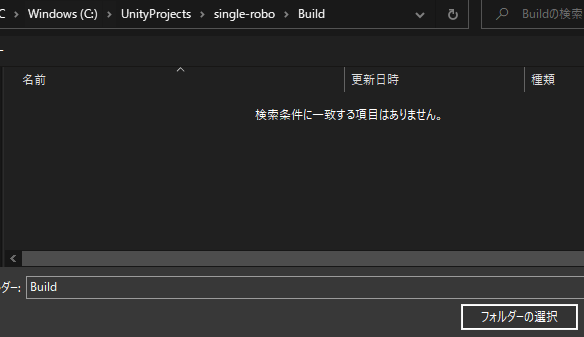
フォルダを選択すると,ビルドが実行されます.
ビルドが完了したら,バイナリが出力されたフォルダ(今回の例ではBuildフォルダ)内に
先ほど,Unityプロジェクトフォルダ配下に配置したconfig.jsonをコピーします.
制御アプリのビルド
シミュレーションの実行の前に制御アプリのビルドを行います.
ビルド手順は,以下のEV3ロボット制御プログラムのビルドをご参照ください.
memory_mmap.txtの編集(通信方式にMMAPを使用する場合のみ)
制御アプリのビルドが完了したら,Unityバイナリ実行のためにアプリケーションフォルダにあるmemory_mmap.txtを編集します.
使用するMMAPファイルのパスを記述するのですが,Unityバイナリを使用する場合には,
MMAPファイルのパスを絶対パスで記述するように変更します.
例:アプリケーション名がline_tarceの場合のmemory_mmap.txt
ROM, 0x00000000, 512
RAM, 0x00200000, 512
RAM, 0x05FF7000, 10240
RAM, 0x07FF7000, 10240
MMAP, 0x40000000, /mnt/c/project/hakoniwa/ev3rt-athrill-v850e2m/sdk/workspace/line_trace/athrill_mmap.bin
MMAP, 0x40010000, /mnt/c/project/hakoniwa/ev3rt-athrill-v850e2m/sdk/workspace/line_trace/unity_mmap.bin
シミュレーションの実行
ビルドが完了したら,シミュレーションを実行します.
先ほど選択したフォルダにビルドしたバイナリが作成されていますので,
<プロジェクト名>.exeまたは<プロジェクト名>.appのファイルを実行することでシミュレータが起動します.
起動した画面上で実行ボタンを押下すれば,シミュレーションが実行されます.
