単体ロボット向けシミュレータ使用手順(ARM版)
使用手順
- 環境変数の設定(Mac版のみ)
- cfgフォルダの配置(初回起動時のみ)
- EV3ロボット制御プログラムのビルド
- Unityのシミュレータの起動
- athrillの起動
環境変数の設定(Mac版のみ)
Mac版の場合,gccインストールフォルダの環境変数の設定が必要になります.
export GCC_PATH=<gccインストールフォルダ>/gcc-arm-none-eabi-9-2019-q4-major
cfgフォルダの配置(初回起動時のみ)
cfg ファイルの配置(Mac版の場合)
$ pwd
<インストールフォルダ>/ev3rt-athrill-ARMv7-A
$ mkdir cfg/cfg
$ cp cfg/cfg-mac cfg/cfg/cfg
$ chmod +x cfg/cfg/cfg
cfg ファイルの配置(Windows\Linux版の場合)
$ pwd
<インストールフォルダ>/ev3rt-athrill-ARMv7-A
$ mkdir cfg/cfg
$ cp cfg/cfg-linux-64 cfg/cfg/cfg
$ chmod +x cfg/cfg/cfg
EV3ロボット制御プログラムのビルド
ターミナル上で,ev3rt-athrill-ARMv7-A/sdk/OBJ1.1に移動して,
EV3ロボット制御プログラムをビルドしましょう.
ビルドするには,以下のコマンドを実行してください.
make clean;make
ビルド成功すると,asp というバイナリができます.
$ ls asp
asp
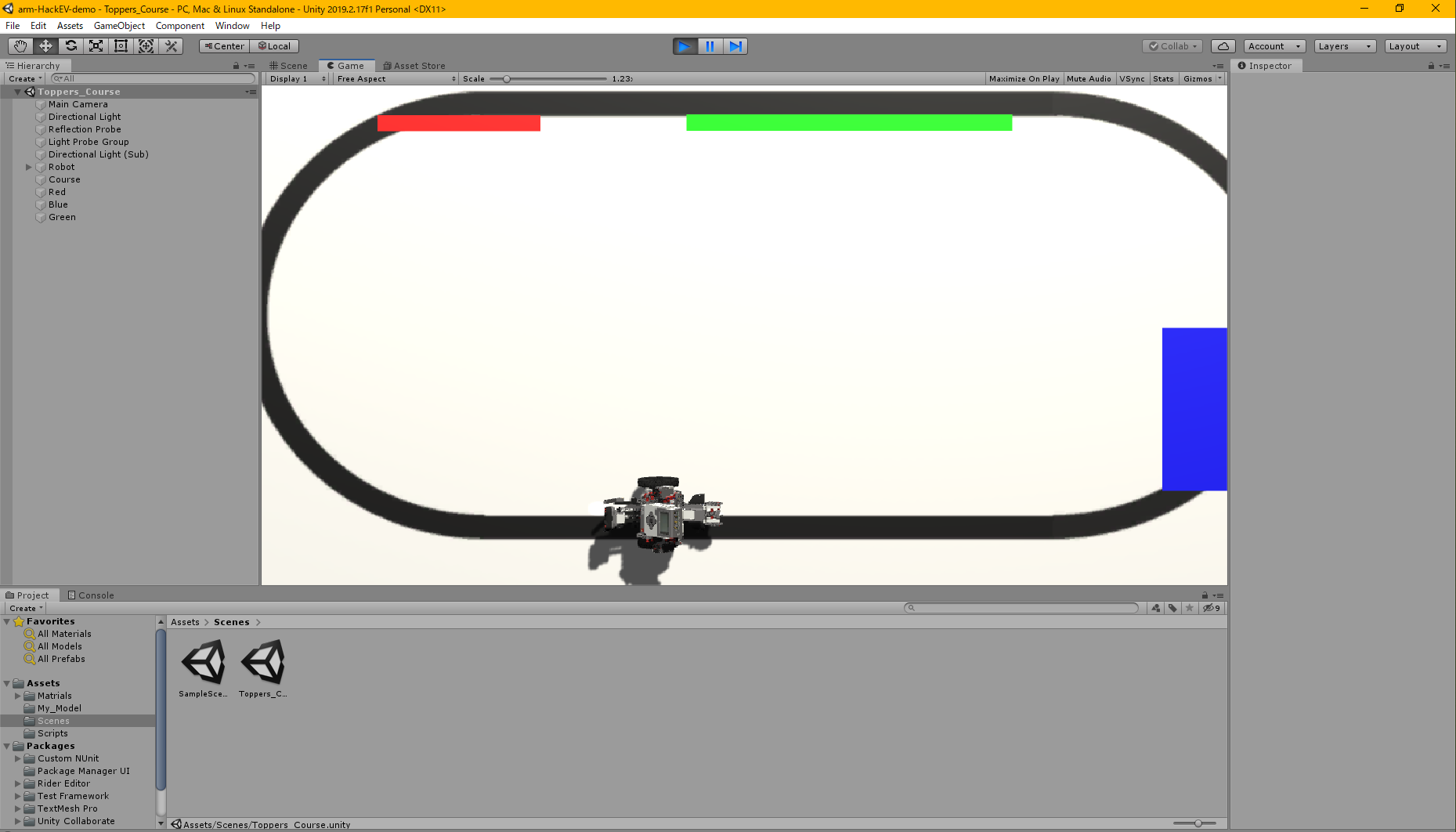
Unityのシミュレータの起動
※必ず,athrillの起動より先にUnityのシミュレータの起動を行ってください
次に,Unityをシミュレーションモードにします.
Unityの画面上で ボタンを押下してください.
ボタンを押下してください.
成功すると,下図のような画面に切り替わります.(画像は single-robot-HackEV.unitypackage の場合)
athrillの起動
最後に,athrillを起動しましょう.
ev3rt-athrill-ARMv7-A/sdk/OBJ1.1に移動して,以下のコマンドを実行してください.
- unityとの通信が UDP の場合
UDP版の場合
$ athrill2 -c1 -t -1 -m memory.txt -d device_config.txt ../asp
MMAP版の場合
$ athrill2 -c1 -t -1 -m memory_mmap.txt -d device_config_mmap.txt ../asp
成功すると,以下のログが出力され,Unity上のEV3ロボットが動き始めます.
core id num=1
ROM : START=0x0 SIZE=512
RAM : START=0x5ff7000 SIZE=10240
Elf loading was succeeded:0x0 - 0xfd68 : 63.360 KB
ELF SYMBOL SECTION LOADED:index=22
ELF SYMBOL SECTION LOADED:sym_num=964
ELF STRING TABLE SECTION LOADED:index=23
athrill_device_func_call=0x60f7444
TOPPERS/ASP3 Kernel Release 3.2.0 for V850-ESFK3 (Nov 6 2019, 10:56:14)
Copyright (C) 2000-2003 by Embedded and Real-Time Systems Laboratory
Toyohashi Univ. of Technology, JAPAN
Copyright (C) 2004-2017 by Embedded and Real-Time Systems Laboratory
Graduate School of Information Science, Nagoya Univ., JAPAN
brick_dri initialized.
_____ ______ ___ ______
/ __/ | / /_ // _ \/_ __/
/ _/ | |/ //_ </ , _/ / /
/___/ |___/____/_/|_| /_/
Powered by TOPPERS/HRP2 RTOS
Initialization is completed..
System logging task is started.