MMAP用Unity設定
UnityとathrillをMMAPで通信する場合は,Unity側で以下の設定を行います.
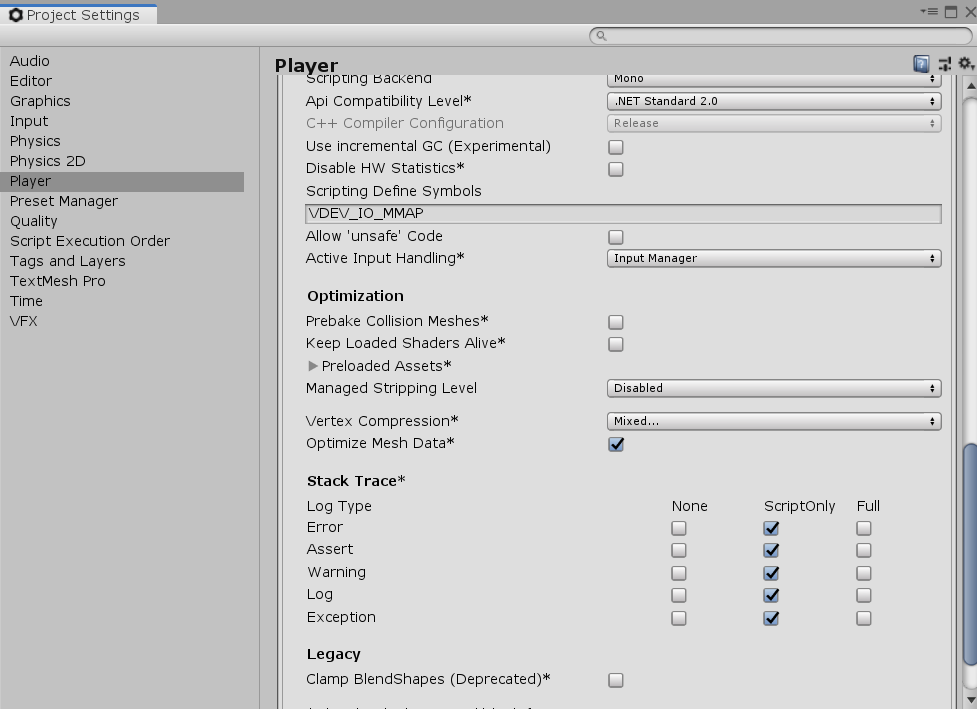
Unity のメニューから,「Edit」⇒「Project Settings」を選択します.
「Player」Other SettingのScripting Define Symbols にVDEV_IO_MMAPと設定します.
MMAP用パラメータ設定
※なお,このページで紹介しているUnity画面の画像はWindows版のものです
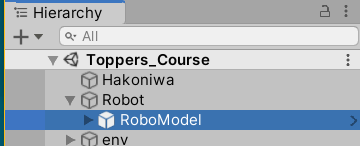
HierarchyビューでRobot配下のRoboModelを選択してください.
すると画面右のInspectorビューに[Io Writer (Script)]と[Io Reader (Script)]の項目が表示されます.
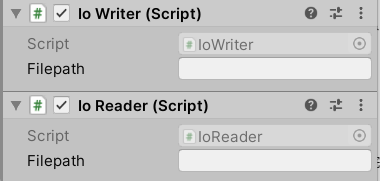
インポート直後ですと,[Io Writer (Script)] と [Io Reader (Script)]の Filepath は空白です.
ここに設定する値としては,athrillとUnity間で通信するためのMMAPファイルの絶対パスを指定します.
MMAPファイル自体は,以下の2ファイルがapp.cと同じフォルダに含まれています.
- athrill_mmap.bin
- unity_mmap.bin
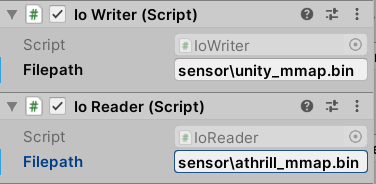
unity_mmap.bin の絶対ファイルパスを,[Io Writer (Script)]のFilepathに設定してください(設定例:下図).
athrill_mmap.bin の絶対ファイルパスを,[Io Reader (Script)]のFilepathに設定してください(設定例:下図).
例えば,v850版を使用するという前提でev3rt-athrill-v850e2mのローカルリポジトリが,C:\project\hakoniwaにあり,実行したいアプリケーションのフォルダがline_traceの場合は,
以下のパスを設定します.
[Io Writer (Script)]のFilePath
C:\project\hakoniwa\ev3rt-athrill-v850e2m\sdk\workspace\line_trace\unity_mmap.bin[Io Reader (Script)]のFilePath
C:\project\hakoniwa\ev3rt-athrill-v850e2m\sdk\workspace\line_trace\athrill_mmap.bin
以上でMMAPの設定は終わりです.