複数のロボット,複数の制御プログラムによるシミュレーションを同じ環境で行うプロトタイプモデルです. UnityのPhotonライブラリを用いて複数のUnity環境の同期を行っており,加えてアセット間の時間同期も実現しています. またVRによるシミュレーション環境へのダイブも試行しています.
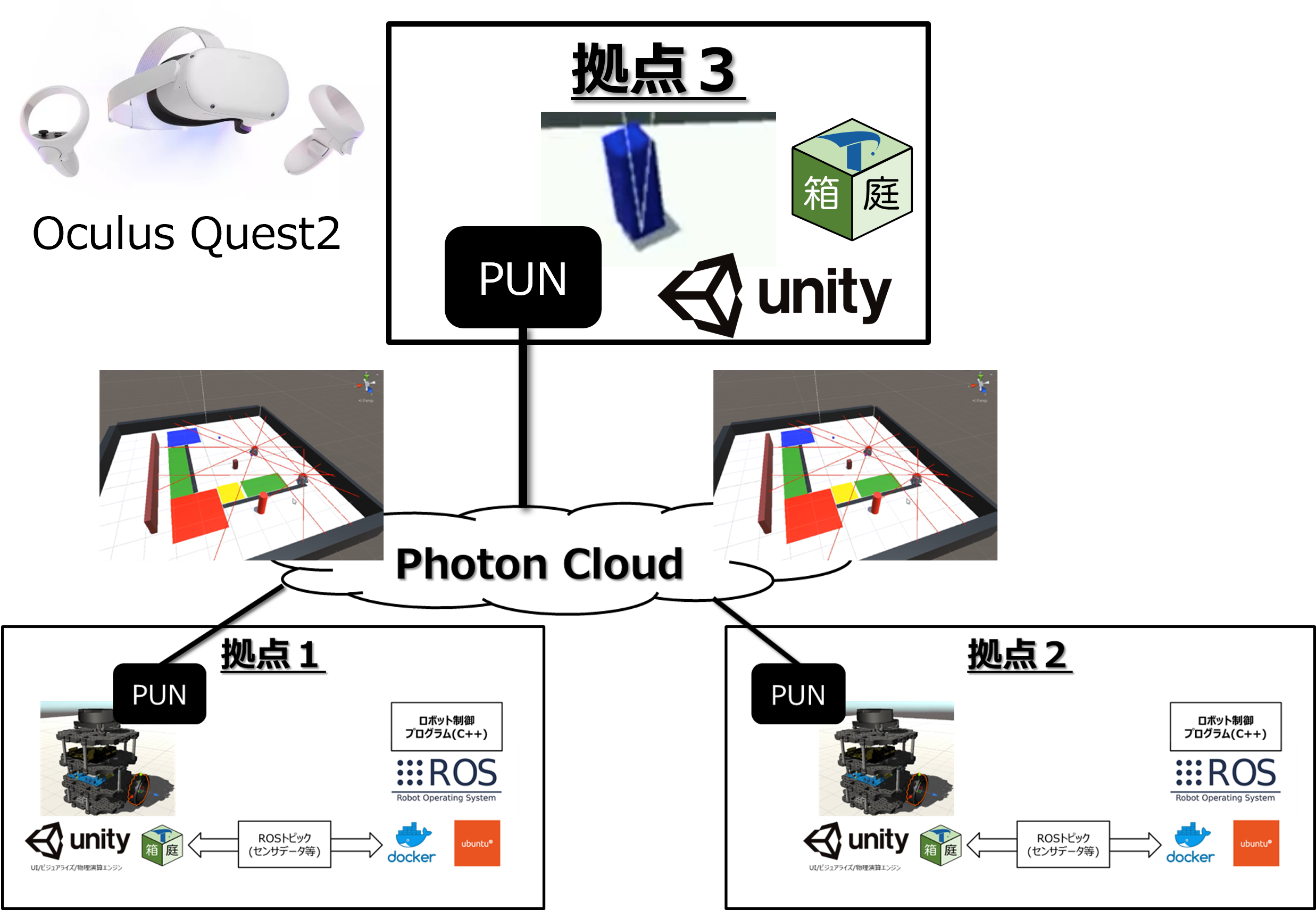
技術研鑽視点での狙い
- マルチ環境での連携方法検討(シミュレーション時間同期等)
- 箱庭アセット間の通信可視化方法の検討(ROS/ROS2連携含む)
- 箱庭アセットの仕組み検討
その他の狙い
- ROSユーザ層に箱庭を広める(広報活動)
導入方法と使用方法
以下のGithubリポジトリにて,各種デモを公開しています.ぜひお試し下さい.
‐ toppers/hakoniwa-ros-multiplay
動作例のデモ
- photonによる複数ロボットの連携
- Oculus Questとの接続の様子
- VRで箱庭内に入った様子