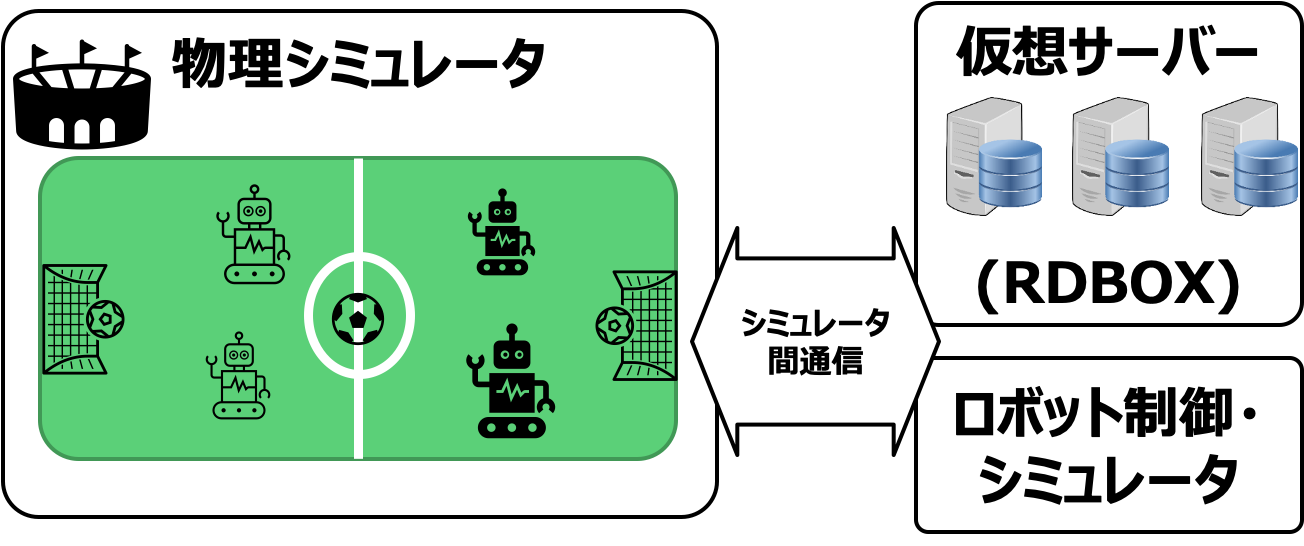
クラウドとロボティクスとの連携を目指した箱庭プロトタイプモデルです.
技術研鑽視点での狙い
- クラウド連携方法検討
- ロボット間の連携方法検討(より複雑なロボットの動き/干渉に挑戦)
- 箱庭アセットを増やす仕組みの検討
その他の狙い
- RDBOX連携(開発支援仮想環境としての箱庭の実績作り)
- RDBOXユーザ層に箱庭を広める(広報活動)
現在,本プロトタイプモデルの実現に向けて鋭意開発中です.公開までしばしお待ちください.
クラウドとロボティクスとの連携.
クラウドとロボティクスとの連携を目指した箱庭プロトタイプモデルです.
現在,本プロトタイプモデルの実現に向けて鋭意開発中です.公開までしばしお待ちください.