This prototype model simulates multiple robots and control programs in the same environment. This prototype uses Unity’s Photon library to synchronize multiple Unity environments and even time synchronization among assets and uses VR technology to dive into the simulation environment for verification.
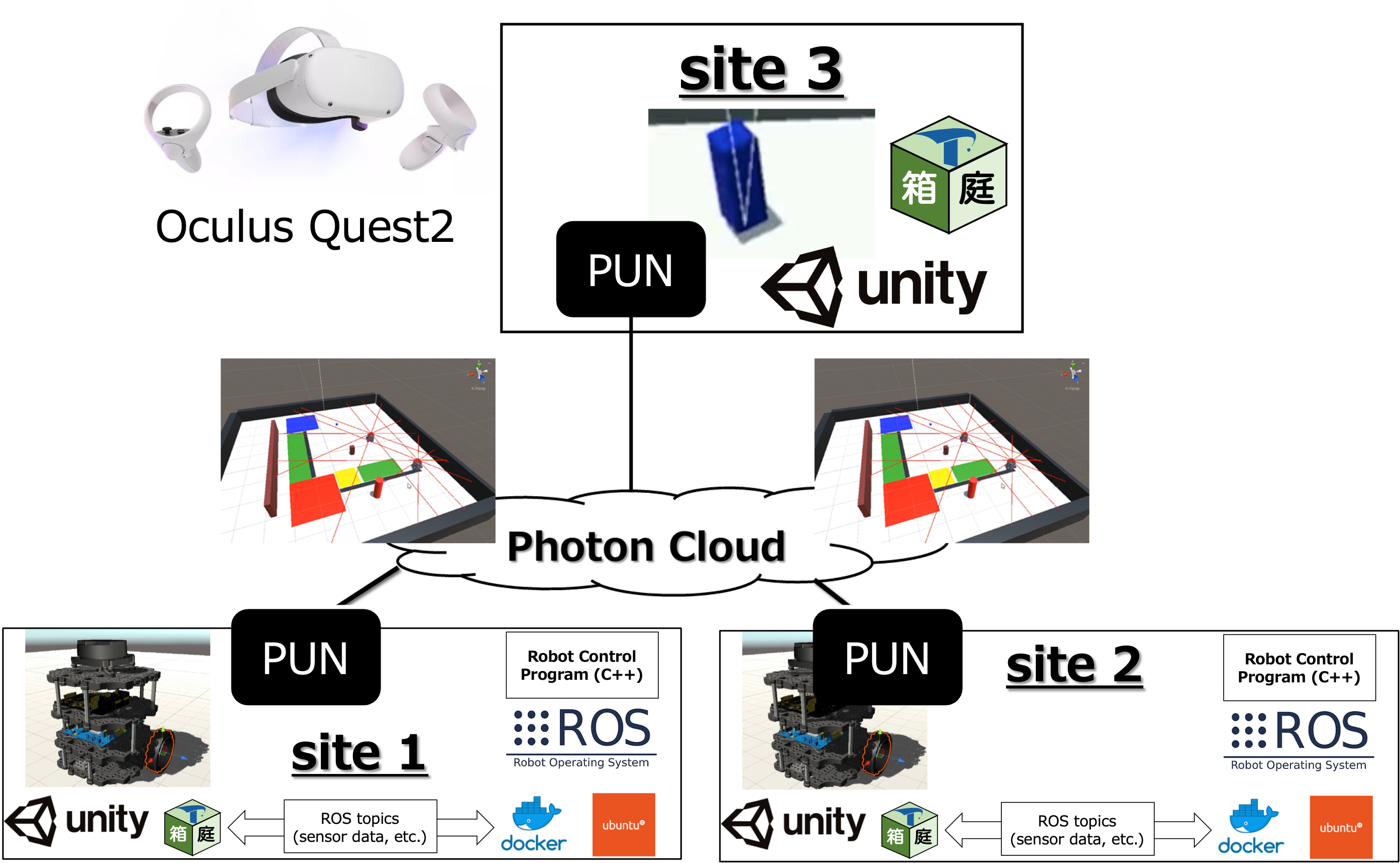
Design intent from a technical study perspective
- Study of methods of collaboration in multiple environments (e.g., simulation time synchronization)
- Study on how visualize communication among Hakoniwa assets (including ROS/ROS2 collaboration)/ROS2連携含む)
- Study of mechanisms to augment Hakoniwa assets
Other design intent
- Promote Hakoniwa to the ROS user base (PR activities)
Installation & Usage
Various demos are available at the following Github repository. Try them out.
‐ toppers/hakoniwa-ros-multiplay
Demonstration of examples
- Multiple robot collaboration with photon
- Scene of connection with Oculus Quest
- Scene diving into Hakoniwa using VR